![]()
Especialização em Inovação em Mídias Interativas – CIAR / UFG
Polo de Alto Paraíso – GO
Módulo VI – Sensores
Componentes: Anderson Santos de Brito, Christina Piovezan Dias, Elias do Nascimento Melo Filho, Jitone Leônidas Soares, Keyla Reis de Oliveira, Lairson Geisel, Meire Cristina Cunha, Renata Borges Ferreira Rios e Wellyelton Gualberto de Brito Rodrigues.
PROJETO FINAL: Fred, o Robô Nerd
INTRODUÇÃO
A Realidade Aumentada (RA) é a impressão de elementos virtuais em ambientes reais, acrescentando informações ou dados ao mundo real (TORI, 2010). No âmbito da educação, a RA pode ser utilizada de várias formas, como por exemplo, estimulando o estudante na análise do mundo real ao ofertar informações suplementares, objetos virtuais, ligadas ao ambiente real.
Ela pode também se estender na integração do mundo real com recursos de aprendizado digitais, possibilitando a visualização de fenômenos que não podem ser reproduzidos em ambiente real. E, por fim, a manipulação de materiais virtuais em uma variedade de perspectivas (WU, 2013).
A RA é uma particularização de um conceito mais geral, denominado realidade misturada, que consiste na sobreposição de ambientes reais e virtuais, em tempo real, por meio de um dispositivo tecnológico (KIRNER, 2006).
Acredita-se que a RA pode contribuir no processo de ensino-aprendizagem por oferecer uma nova forma de representação de conteúdo. A tecnologia de RA permite a partir da projeção de objetos ou de fenômenos inexistentes, uma maior interação entre o discente e o conteúdo exposto possibilitando um melhor entendimento do que antes ficava apenas na imaginação, sem, contudo, necessitar de um amplo conhecimento da tecnologia por parte do discente (ARAÚJO, 2009).
OBJETIVO GERAL
Criar um dispositivo eletromecânico (Fred, o Robô Nerd) capaz de realizar trabalhos de maneira autônoma ou pré-programada, cujo apoio e auxílio sejam voltados para uma aprendizagem baseada na realidade aumentada.
OBJETIVOS ESPECÍFICOS
- Apresentar os benefícios da robótica para a educação, justificando-os por meio do Fred, o Robô Nerd;
- Mostrar as etapas e os procedimentos para a criação do Fred, o Robô Nerd;
- Identificar o material necessário para a confecção do Fred, o Robô Nerd e seu esquema elétrico, bem como a lógica de programação utilizada para o funcionamento deste;
- Evidenciar a importância da realidade aumentada para o processo de ensino-aprendizagem.
REFERENCIAL TEÓRICO
O referencial teórico tem como base a pesquisa bibliográfica em sites sobre tecnologia, artigos científicos e documentos, de acordo com a orientação dos professores do Módulo VI – Sensores, e da tutora Thamara Lima Vieira Santos. Buscou-se desenvolver o trabalho, tendo como norte a utilização da plataforma Arduino (plataforma física de computação de código aberto baseado numa placa microcontroladora).
METODOLOGIA
Utilizamos a metodologia de pesquisa empírica, buscando testar hipóteses que tratem de relações de causa e efeito. Como se sabe, a metodologia de pesquisa empírica é consiste na utilização de um experimento para testar e validar hipóteses.
Nesta pesquisa, determina-se um objeto de estudo, identifica-se que variáveis participam e / ou interferem no processo, verifica-se a existência de relações de dependência entre as variáveis e, em uma outra etapa, analisa-se a sua aplicabilidade prática, de que modo esta pesquisa pode ser utilizada para interferir na realidade (DEMO, 1995). Em geral, o conceito de pesquisa científica na visão do senso comum está relacionado à pesquisa experimental, uma vez que ela traz resultados mais práticos para a sociedade.
Buscou-se conhecer e analisar as referências científicas existentes sobre um determinado assunto com o intuito de colher informações e conhecimentos. De acordo com o que foi pesquisado nas referências abordadas no desenvolvimento do projeto acerca da realidade virtual e a realidade aumentada para a construção de um robô, a metodologia empírica é fundamental para a importância da sistematização do esquema elétrico do robô aqui projetado e em seguida a descrição e a funcionalidade do mesmo.
1. REALIDADE AUMENTADA
A realidade aumentada é definida de várias maneiras: como o enriquecimento do ambiente real com objetos virtuais, usando algum dispositivo tecnológico, funcionando em tempo real; na melhoria do mundo real com textos, imagens e objetos virtuais, gerados por computador; e na mistura de mundos reais e virtuais em algum ponto da realidade / virtualidade contínua, que conecta ambientes completamente reais a ambientes completamente virtuais (PANTELI, 1999).
Contudo, a RA um sistema que suplementa o mundo real com objetos virtuais gerados por computador, parecendo coexistir no mesmo espaço e apresentando as seguintes propriedades: combina objetos reais e virtuais no ambiente real; executa interativamente em tempo real; alinha objetos reais e virtuais entre si; aplica-se a todos os sentidos, incluindo audição, tato, força e cheiro (AZUMA, 2001).
Já quando se refere aprendizagem multimeios entende-se como informação constituída de vários materiais não convencionais, que possuem em sua característica a marca do registro histórico e da evolução constante, uma vez que a cada dia surge uma nova tecnologia.

Figura 1 – Marcadores de Realidade Aumentada Voltados para Aprendizagem.
Diferentes termos são empregados para denominar esses materiais, como materiais audiovisuais, meios audiovisuais, materiais não impressos, materiais não gráficos, materiais não bibliográficos, mídias, médias e multimeios. A terminologia também não é padronizada na língua inglesa, que emprega indistintamente audiovisual, nonprint materials, non-book materials, multimedia e médium, que são materiais que estão em constante evolução. O progresso da tecnologia faz surgirem os mais variados suportes […] (AMARAL, 1987).

Figura 2 – Realidade Aumentada.
Funciona por meio do reconhecimento de marcadores impressos que, quando capturados pela webcam do computador, permitem que sejam posicionados sobre o marcador elementos virtuais como imagens, vídeos, animações, modelos 3D, etc.
2. DESCRIÇÃO E FUNCIONALIDADE DO PROJETO
Diante de tudo que a aprendizagem multimeios propicia, propomos a criação de um robô que vislumbre a RA, sobrepondo elementos virtuais e reais estejam estes alinhados ou não em um mesmo espaço tridimensional, interagindo assim em tempo real. Este dispositivo eletromecânico será capaz de realizar trabalhos de maneira autônoma ou pré-programada, cujo apoio e auxílio sejam voltados para uma aprendizagem multimeios. Um robô que permitirá explorar um assunto no âmbito tridimensional e sensorial.
Ao tratar a RA, diversos parâmetros serão contemplados, tendo em vista que a ideia consiste em um robô que permitirá explorar um assunto no âmbito tridimensional e sensorial. Ver, ouvir, sentir e perceber como se estivesse presente em determinado local, mesmo que não esteja. O robô, por meio de sensores, projetores e alto-falante possibilitará a RA através de um modelo 3D em que nós possamos, além de ver, tocar.
Com o nome sugestivo de Fred (o Robô Nerd), seria ainda possível promover a inclusão de alunos portadores de alguma deficiência (auditiva e visual), pois uma das funcionalidades do Fred seria a captação da fala do professor e a tradução simultânea para a Língua Brasileira de Sinais ou Braile, uma das funcionalidades, evitando o afastamento dessas crianças do contexto escolar.
 Figura 3 – Robô Ilustrativo.
Figura 3 – Robô Ilustrativo.
E com a produção em grande escala, seria possível os usuários domésticos adquirirem estes dispositivos eletromecânicos para que pudesse realizar essas mesmas funções em suas residências ou em qualquer outro lugar que fosse possível a prospecção de imagens, facilitando a assimilação de conteúdos um pouco mais complexos por parte dos estudantes, pois não haverá necessidade de carregar ou vestir algum equipamento para desfrutar da RA.
3. MATERIAL PARA CONFECÇÃO
Os materiais básicos para fabricar um robô são: o design, ferramentas, bateria, circuitos, sensores, motores e rodas/pernas. O funcionamento interno do robô é parte essencial na construção, com sensores e circuitos baseados no projeto do desing. A placa de circuito do microprocessador pode ser programada de muitas maneiras para diferentes objetivos, como movimentos, extensões de braço e reconhecimento de voz.
Os sensores transformam som, luz, movimento e outros elementos em sinais eletrônicos. Acelerômetros e giroscópios calibram a orientação e o movimento, permitindo que o robô execute ações com base no ambiente. Caso o robô precise se mover são necessários rodas e motores de passo. Alguns robôs, principalmente os humanóides, utilizam pernas ao invés de rodas.
Rodas maiores fazem com que o robô possa cobrir uma área maior de forma mais rápida, enquanto rodas menores dão ao robô maior tração para puxar e empurrar, além dos movimentos mais precisos. Motores de passo fornecem movimento preciso para braços e também para as rodas do robô. O projeto trata-se de um motor elétrico de corrente contínua que vira o seu eixo em alguns graus quando recebe impulsos de um computador.
4. ESQUEMA ELÉTRICO
Primeiramente, a ideia de todo o projeto elétrico foi baseada na construção de um robô apresentando pelo Núcleo de Pesquisa em Sistemas e Tecnologia da Informação da Universidade Ceuma e por professores de São Luís do Maranhão, com o intuito na elaboração de um robô, com movimentação (CARDOSO apud PEREIRA, 2014).
O primeiro elemento a ser usado é a placa de Arduíno, que nesse caso, iremos utilizar sua versão Duemilanove, uma versão um pouco mais antiga do que a versão UNO (versão mais utilizada hoje por motivo de aporte educacional). Entretanto, exemplificando as diferenças de versões, o que muda bastante entre as duas são os microcontroladores.
A versão UNO utiliza o Atmega 328, o mesmo do Duemilanove. Porém, no Arduíno UNO, existe um microcontrolador adicional (Atmega8U2) no lugar do chip FTDI utilizado no Duemilanove, que é responsável pela conversão USB / serial, como descrito na figura abaixo. Portanto, essa é única diferença, ou seja, o projeto pode ser realizado com a versão UNO do Arduíno.
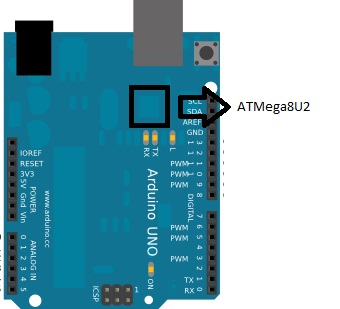
Figura 4 – Placa Arduino.
Para o funcionamento do projeto, precisa-se do que chamamos de driver, também conhecido na linguagem eletrônica por CI. Nesse caso, iremos utilizar o Driver SN754410 que contém quatro drivers internos que permitem controlar até quatro motores em um único sentido ou dois motores nos dois sentidos. Os pinos 3, 6, 14 e 11 são utilizados para conectar os motores que irão compor o funcionamento das rodas do robô.
Na figura abaixo, estão ilustrados os componentes do driver a ser utilizado. A ligação do CI deve ser iniciada por uma protoboard a ser conectada com fios próprios para ligação Arduíno ou fios adaptados (cabo de telefone fixo) que possuem a mesma função.
 Figura 5 – Componentes do Driver.
Figura 5 – Componentes do Driver.
A ligação do CI é realizada a partir dos comandos em que os pinos de saída (output) 3, 4, 9. 5, 6 e 10 do Arduíno são conectados aos pinos de entrada (input) 2, 7, 1, 10, 15 e 9 do CI SN754410 para fazer o acionamento dos motores. Os demais pinos são ligados na protoboard. Para a ligação dos pinos utilizaremos o esquema abaixo como exemplo:
 Figura 6 – Ligação dos Pinos.
Figura 6 – Ligação dos Pinos.
Para que o robô possa identificar o caminho a sua frente e ter referências da realidade aumentada e virtual, iremos utilizar um sensor ultrassônico que possui sensores para detecção de obstáculos; possibilitando o aumento da precisão de deslocamento do robô em um ambiente, uma vez que permite que o robô diminua sua incerteza com relação à sua localização dentro de um entorno previamente modelado. O modelo de sensor que será usado é o HC-SR04.
Sensores deste tipo se justificam pelo baixo custo e uma precisão aceitável para determinar a distância de um objeto utilizando o sonar para desviar de obstáculos.
 Figura 7 – Sensor Modelo HC-SR04.
Figura 7 – Sensor Modelo HC-SR04.
As características principais para que possam ser usados, a título de informações importantes no momento da ligação do sistema, são:
- distância máxima – 500 cm;
- distância mínima – 3 cm;
- sensibilidade – detecta um cabo de vassoura com 3 cm de diâmetro a mais de 2 m de distância;
- disparo (Trigger) – 10uS Min. Nível TTL;
- pulso de eco – sinal TTL positivo, proporcional à distância ao obstáculo;
- dimensões – 43 mm x 20 mm x 17 mm.
Para que o robô tenha movimentações específicas, será utilizado um motor de corrente contínua com o objetivo de realizar o controle independente de dois motores DC que serão afixados na estrutura do robô para que ele seja capaz de deslocar-se em qualquer direção. Os motores podem ser retirados de lixos eletrônicos como impressoras velhas que geralmente possuem motores elétricos de 12V (9-20V).
 Figura 8 – Motor Elétrico 12V.
Figura 8 – Motor Elétrico 12V.
Para se movimentar, o robô precisará de três elementos físicos de movimentação: rodas de tração, apoio e engrenagens. Esses materiais podem ser retirados de impressoras velhas que possuem sistema parecidos com o que desejamos aplicar no projeto. Um exemplo disso pode ser visualizado, na imagem abaixo, a qual mostra uma impressora desmontada. É possível compreender a quantidade de engrenagens que a mesma possui.
 Figura 9 – Impressora Desmontada.
Figura 9 – Impressora Desmontada.
Iniciando a questão das rodas, o tamanho delas é um fator interessante do projeto. Com rodas grandes temos movimentos rápidos, menos torque para transportar carga pesada e controle de posição difícil. Com rodas pequenas temos movimentos mais lentos e fácil posicionamento.
A roda de apoio estará acoplada por um pino na traseira da plataforma de suporte, dando auxílio necessário na mudança de direção do robô por ser leve e possibilitar movimentos giratórios rápidos. Essa roda pode ser comprada separadamente em lojas de eletrônicos.
O motor, a engrenagem e o eixo do suporte são encontrados unidos em certas impressoras a jato de tinta. Para a engrenagem com a roda não cair de seu eixo, deve ser feito um furo com parafusadeira e uma broca na ponta que deve ser mais fina do que o eixo a ser perfurado, com mais ou menos 0,5cm de profundidade. Logo em seguida, deve ser injetado com um alfinete para preencher o orifício aberto e depois colocar a roda já unida/parafusada com a engrenagem, utilizando uma tachinha com pino fino de metal e ponta redonda ou com uma circunferência, e posteriormente inserida na referida engrenagem.
Uma estrutura é necessária. Ela será de idealização livre e dependerá do local e como o robô irá adaptar-se melhor. Em relação ao esquema de Firmware, será utilizada a biblioteca do ARToolKit baseada na ARToolKit. Foi desenvolvida pela Graz University Technology e fez parte do projeto Studierstube [SCH96]. Esta biblioteca apresenta algumas otimizações, como, por exemplo, possibilidade de se utilizar computações de ponto fixo ao invés de ponto flutuante, com o intuito de gerar aplicações eficientes para dispositivos móveis, tais como PDAs (Personal Digital Assistants) e smartphones.
Os marcadores utilizados por esta biblioteca são semelhantes aos do ARToolKit, com a diferença que o desenho no interior do quadrado de bordas pretas consiste em uma codificação do identificador do marcador. Essa codificação possibilita que o usuário utilize até 512 diferentes marcadores, diminuindo a ocorrência da confusão entre marcadores diferentes.
Uma das importantes características e utilização dessa biblioteca no projeto – que está presente no ARToolKitPlus – é a utilização da técnica de limiar adaptativo, a qual permite o ajuste automático do sistema de detecção dos marcadores conforme as alterações sofridas pela a luz do ambiente capturadas pela câmera.
Para uma melhor utilização do ARToolKitPlus é necessário um breve conhecimento da linguagem de programação intitulada de WIRING, que é uma linguagem de programação baseada em C/C++ para escrever e ler nas entradas/saídas digitais e analógicas do sistema Arduíno.
Os programas desenvolvidos leem valores do sensor de ultrassom e quando recebem a reflexão de volta de algum obstáculo os motores DC são ativados. Um conversor USB-TTL FTDI no Arduíno encaminha o firmware através da comunicação serial USB.
Na imagem abaixo, está descrito o resumo de todo o sistema elétrico apresentado nas etapas anteriores. Pode-se observar a alimentação de dois conjuntos de 9V (alimentação fundamental para cada motor), e a sequência de disposição de dois Leds (nesse caso de cores laranjadas), que são esquematizados para indicar obstáculos do sensor ultra-som interligado com o CI, e o desempenho físico e mecânico do robô.
 Figura 10 – Esquema Elétrico do Projeto.
Figura 10 – Esquema Elétrico do Projeto.
5. LÓGICA DE PROGRAMAÇÃO
Lógica de programação é um conjunto de todas as instruções baseadas na lógica matemática que foram dadas ao programa com o objetivo de solucionar um problema, de modo que essas atividades se relacionem entre si montando um raciocínio detalhado capaz de solucionar o problema.
O programador constrói o software do robô através desta linguagem de programação. Este dispositivo deverá apoiar a aprendizagem de estudantes fora e dentro da sala de aula, utilizando recursos da RA, para que os estudantes possam assimilar o conteúdo ministrado pelos docentes, bem como possa ser empregado no processo de aprendizagem de estudantes que possuam alguma deficiência (visual e / ou auditiva).
Utilizar-se-á os princípios do Projeto Robótica Pedagógica ou Educacional Livre, que possui uma proposta diferenciada. Enquanto a maioria dos projetos de robótica no ambiente escolar é desenvolvida com a utilização de kits padronizados, este projeto parte para soluções livres em substituição aos produtos comerciais. Propõe o uso de softwares livres como base para a programação, e utiliza-se da sucata de equipamentos eletroeletrônicos e outros tipos de lixo, para a construção de kits alternativos de robótica pedagógica (de acordo com a realidade social de cada escola) e protótipos de artefatos cognitivos (robôs, braços mecânicos, elevadores).
Como se trata de um projeto educacional, a programação será baseada em software open-source do Linux – sistema operacional que permite a qualquer pessoa modificar o código original. Será utilizado o Robot Operating System (ROS), pois este sistema fornece bibliotecas e ferramentas para criar aplicações para robôs. Fornece abstração de hardware, dispositivo de drivers, bibliotecas, visualizadores, transmissão de mensagens, e gerenciamento de pacotes. O ROS também está licenciado sob uma fonte aberta.
5.1 Reconhecimento de Luminosidade
O Robô faz automaticamente uma afirmação ou pergunta caso perceba, por meio de sensores, que a luminosidade está baixa ou alta. A lógica básica de programação para esta funcionalidade é:
Inicio
Leia (luminosidade)
Teste (luminosidade)
Caso (luminosidade > 0 e luminosidade <= 10) então
aleatoriamente (
fale(“Hora de descansar. Vamos dormir?”,p1),
fale(“Ei, não me guarde. Você ainda está ai?”,p2),
fale(“Vamos aprender sobre economia de energia?”,p3)
);
aguardar(resposta,30);
caso (luminosidade > 10) então
aleatoriamente (
fale(“Bom dia! O que vamos aprender hoje?”,d1),
fale(“Fale um tema e aprenda mais sobre ele comigo!,d2),
fale(“Deseja ouvir uma música?”,d3)
);
aguardar(resposta,30);
fim caso
Fim;
5.2 Reconhecimento de Comandos de Voz
Para receber estímulos externos, o robô será equipado com reconhecimento de voz. Para tanto, será usado o Annyang, um projeto em javascript para adicionar comandos de voz aos seus aplicativos web. Um exemplo de lógica de programação para essa funcionalidade, quando:
Inicio
ouça(comando,teste_luminosidade)
caso teste_luminosidade = p1
se (comando = ‘sim’) então
fale(“Boa noite”)
desligar();
senão
se (comando = ‘não’) então
fale(“Dormir para quê? Eu sou um robô!”)
fimse;
fimse;
caso teste_luminosidade = p2 …
.
.
.
Fim;
5.3 Leitura de Sinalizadores de Realidade Aumentada
O robô também contará com um sistema de reconhecimento de marcadores de RA e com isso apresentará materiais educativos. A lógica de programação para reconhecimento destes dispositivos é:
caso teste_luminosidade = p3 — O que vamos aprender hoje?
se (comando = ‘Física Quântica’) então
fale (“Física Quântica! Um dos meus assuntos favoritos!”);
liga_câmera();
localize_marcador_RA();
se localizado = ‘S’ então;
mostrar_aula(“Física Quântica”);
senão
aguardar(30);
fale(“Deculpe. Não encontrei seu objeto interativo. Tente novamente.”);
fimse
senão
fale(“Desculpe. Não entendi seu tema. Tente novamente.”);
Fim;
REFERÊNCIAS
AMARAL, S. A. Os Multimeios, a Biblioteca e o Bibliotecário. Revista de Biblioteconomia de Brasília, Brasília, v. 15, n. 1, p. 45-68, jan./jun. 1987.
ARAÚJO, D. (2009). Uso de Realidade Aumentada como Ferramenta Complementar ao Ensino das Principais Ligações entre Átomos. Workshop de Realidade Virtual e Aumentada. 6, 28-30, Pôsteres do WRVA 2009. Disponível em: <http://sites.unisanta.br/wrva/st/62401.pdf>. Acesso em: 17 de jun. 2015.
AZUMA, R. et al. (2001). Recent Advances in Augmented Reality. IEEE Computer Graphics and Applications, v .21, n.6, p. 34- 47.
CARDOSO, Raul. G. S; PEREIRA, T. S; CRUZ, J. H; ALMEIDA, Will. R. M; Uso da Realidade Aumentada em Auxílio à Educação. Pag. 330. Computer on the Beach 2014. Disponível em: <http://www6.univali.br/seer/index.php/acotb/article/viewFile/5337/2794>. Acesso em: 17 jun. 2015.
DEMO, Pedro. Metodologia Científica em Ciências Sociais. 3. ed. São Paulo: Atlas, 1995.
KATO, H.; BILLINGHURST, M.; POUPYREV, I. ARToolKit version 2.33 Manual. Novembro. 2000. Disponível em: <http://hiperrealidade.com.br/home/index.php?option=com_content&task=view&id=6&Itemid=28>. Acesso em: 16 jun. 2015.
KIRNER, C.; TORI, R. Fundamentos de Realidade Aumentada. In: Claudio Kirner; Romero Tori; Robson Siscoutto. (Ed.). Fundamentos e Tecnologia de Realidade Virtual e Aumentada. Pré Simpósio SVR 2006, SBC, Belém, 2006, pp. 22-38.
PANTELI V. Vesamontex. Projeto e Descrição Detalhada das Atividades e Resultados da Implementação de uma Solução de Realidade Virtual Aplicada a Educação. 1999.
SILVA, V. L. M. et al. O uso do Multimeios no processo de ensino-aprendizagem da Escola General Rodrigo Otavio – EMGO. Biblioteca Escolar em Revista, V.1, N.2, p. 45-62, 2012. Disponível em: <http://revistas.ffclrp.usp.br/BEREV/article/viewFile/126/pdf> Acesso em: 17 de jun. 2015.
TORI, R. Virtualidade Real: 3D e Realidade Aumentada na Educação. Site Educação sem Distância. 2010. Disponível em: <http://romerotori.blogspot.com.br/2010/09/virtualidade-real-3d-e-realidade.html> Acesso em: 17 de jun. 2015.
WU, H.-K. et al. Current Status, Opportunities and Challenges of Augmented Reality in Education. Computers & Education, Elsevier Ltd, v. 62, p. 41–49, mar. 2013. ISSN 03601315.